






支持LVDS摄像头输入,LVDS信号输出;2D/3D全景显示、停车辅助、超声波雷达距离预警、DVR功能、移动目标检测(MOD)、车道偏离预警系统(LDWS)。
品牌:
勘帝德科技货号:
AVM IMX6订购 (最小量):
500 套付款:
T/T原产地:
中国发货港口:
广州发货周期:
30 天
360度全景系统(360 AVM System)可以帮助驾驶员360度查看车辆周围的情况,避免发生碰撞。
AVM 系统是由一个图像处理单元控制器(ECU)和四个摄像头构成。ECU将处理四个摄像头捕获的图像,输出视频信号到DVD显示器进行画面显示。
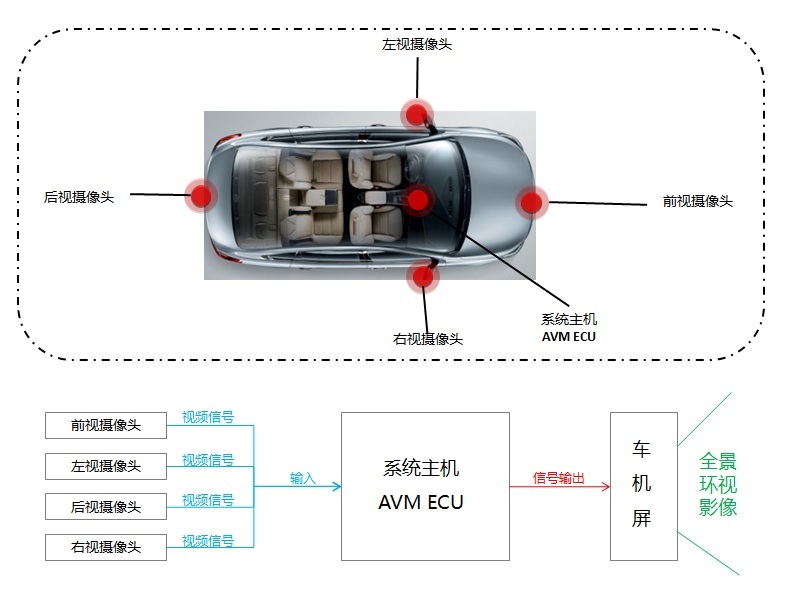
AVM IMX6支持LVDS摄像头输入,LVDS信号输出。
ECU主机规格参数 SPECIFICATIONS - ECU
|
工作电压 |
9~16VDC |
|
工作电流 |
0.98-1.18A@12V |
|
静态电流 |
≤0.1mA |
|
冷启动时间 |
≤4S |
|
热启动时间 |
≤1S |
|
工作温度 |
-40℃ ~ 85℃ |
|
存储温度 |
-40℃ ~ 85℃ |
|
视频输入 |
LVDS |
|
视频输出 |
LVDS |
|
视频通道 |
4通道 |
|
输出分辨率 |
1920(H) x 1080(V) |
|
输出电压 |
8V(供电给摄像头) |
摄像头规格参数 SPECIFICATIONS - CAMERAS
|
工作电压 |
6V~16V |
|
工作电流 |
100±5mA @8V |
|
功耗 |
≤0.84W |
|
分辨率 |
1280(H) x 960(V) |
|
水平视野角度 |
192±3° |
|
垂直视野角度 |
142±3° |
|
视频输出格式 |
LVDS |
|
信噪比S/N |
43.5dB |
|
动态范围 |
120dB |
|
工作温度 |
-40℃~85℃ |
|
存储温度 |
-40℃~95℃ |
|
防水等级(摄像头本体含线束) |
IP69K |
|
单摄像头重量 |
<50g |
基本功能 BASIC FUNCTIONS:
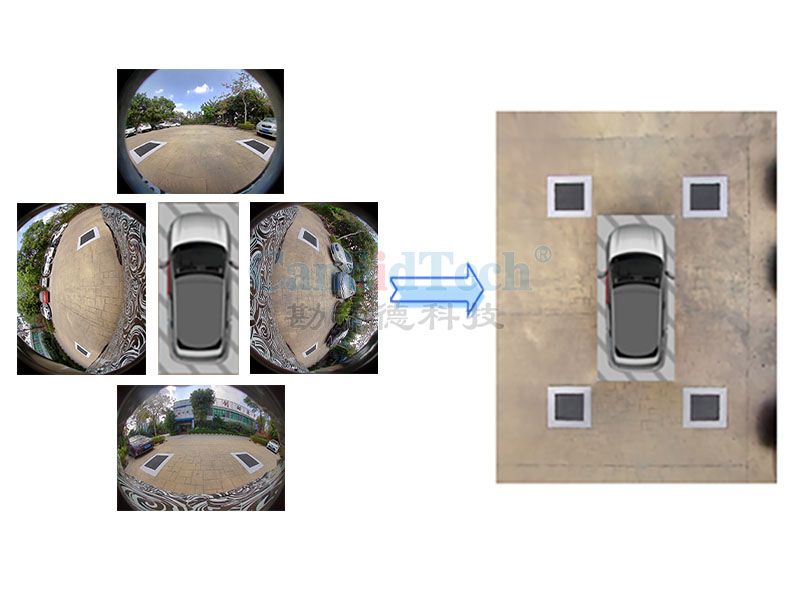
1) 2D 全景环视
把车身周边4个摄像头的原始鱼眼图像经算法正投影到地平面上,并拼接为车身4周360度的图像,同时进行自动亮度平衡,保证各种光线下画面亮度和色彩一致性,方便驾驶员观测车身周边环境。
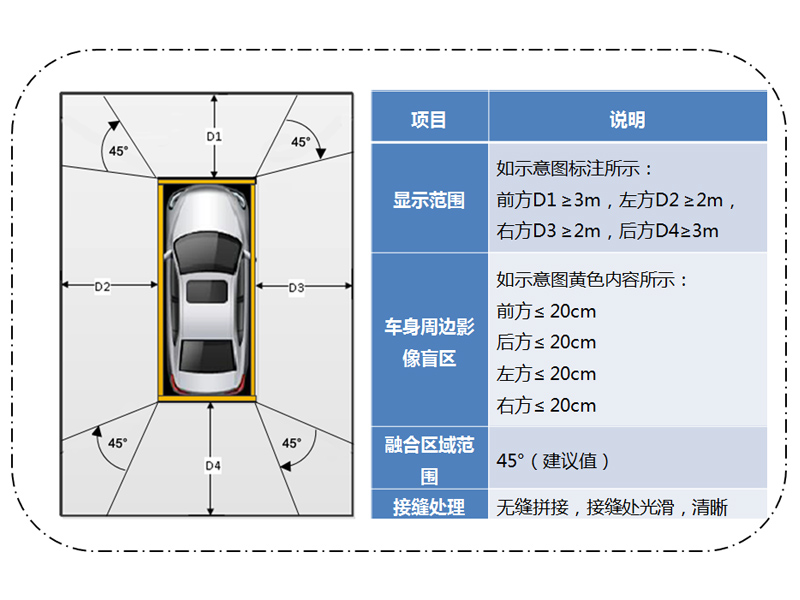
显示范围:前/后≥3m,左/右≥2m
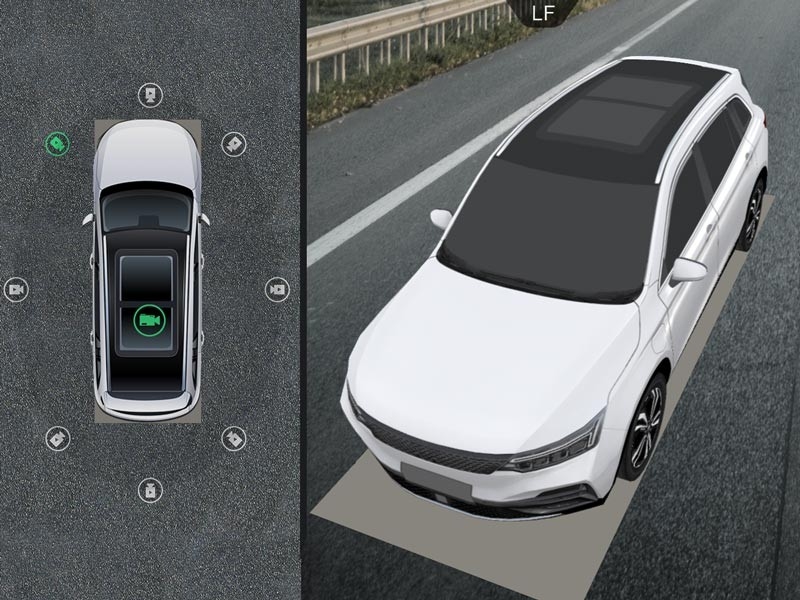
2) 单侧视图
该系统可以显示不同方向的图像。可将车辆前后左右中某一侧的单独视角影像进行鱼眼矫正后输出,方便驾驶员观察车辆周围环境。

3) 3D 全景环视
注:3D汽车模型可选,需要实际的汽车数据来建立模型。

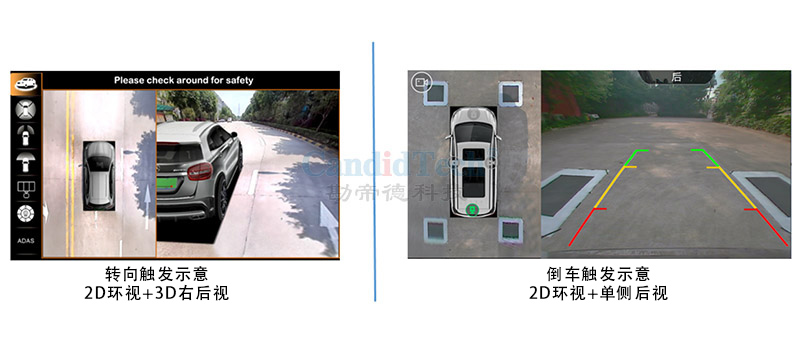
4) 视图切换
系统可根据转向灯、档位信息、AVM按键、等进行各种视图模式切换。
例如,如果右转信号打开,视图将转变为2D环视和3D后右视图。
例如,如果档位转换为“R”,视图将转换为2D环视和后视图。
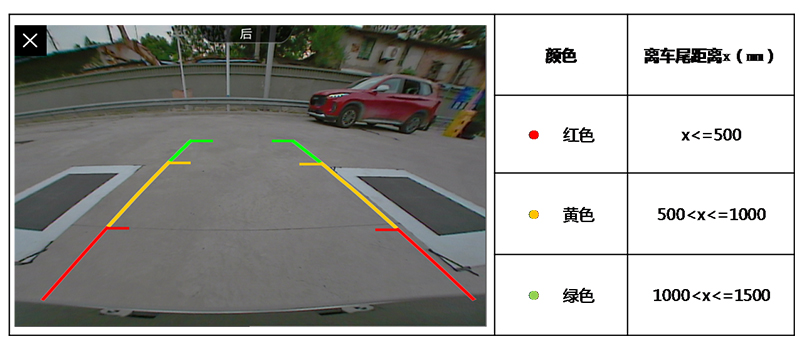
5) 动态轨迹线和静态轨迹线
当驾驶员换挡到“R”档时,系统将显示2D环视和后视图。同时会出现静态辅助线或动态辅助线,以辅助驾驶员停车或倒车。
注:轨迹线可选,用户可根据需要选择静态轨迹线、动态轨迹线或不显示。
扩展功能 EXPANDING FUNCTIONS:
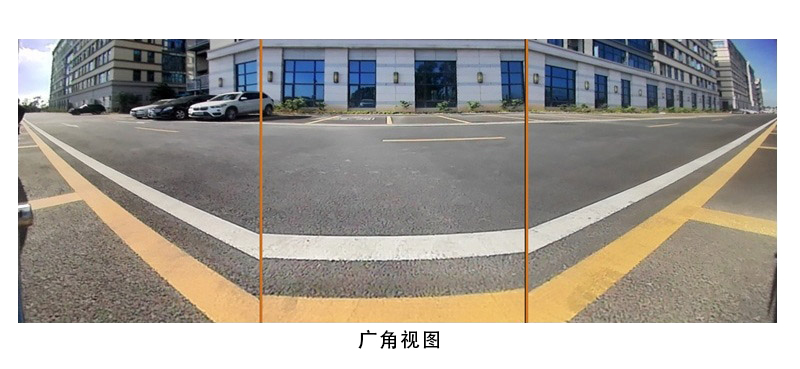
1) 广角视图
三分割画面,可清晰看到左右接近180°的视野,便于在出车时观察左右是否有来车
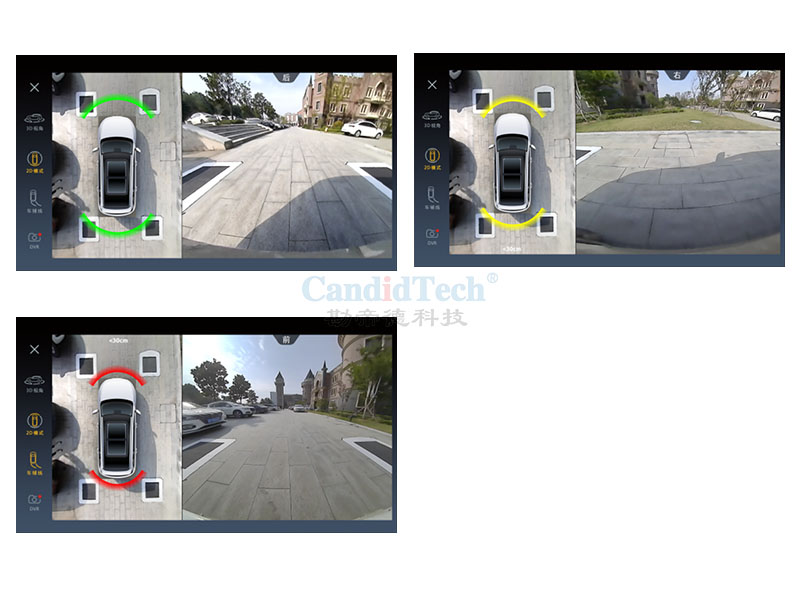
2) 超声波雷达距离提示
AVM系统可根据车辆前方四个雷达以及后方四个雷达报警信息,在2D画面叠加雷达挡墙进行提示,并能根据障碍物与车身的距离改变虚拟挡墙的颜色。
3) 行车记录功能(DVR)
AVM系统能存储4路摄像头视频画面,画面效果为鱼眼画面,不矫正,具体实现方式如下:
前后左右四个画面合成一个画面进行记录,如下图所示,合成后的视频画面分辨率为1280×720,同时叠加车辆相关信息功能(如车速、档位等)。
最大支持32GB,格式为FAT32的TF卡。

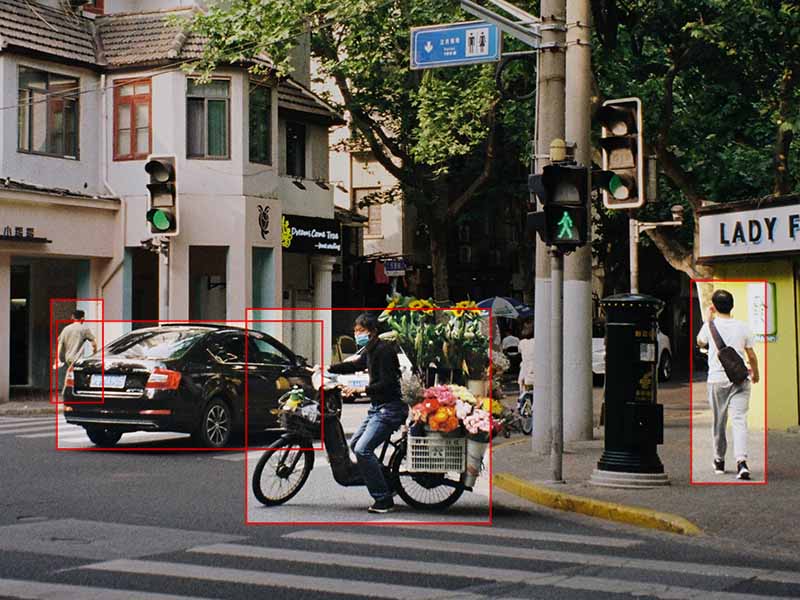
4) 移动物体监测(MOD)
在泊车或起步的行驶场景下,利用图像识别技术,对车辆周边的移动物体进行监测。当检测到有移动物体存在时,通过视觉和听觉的方式来及时对驾驶行为做出调整,避免事故的发生。
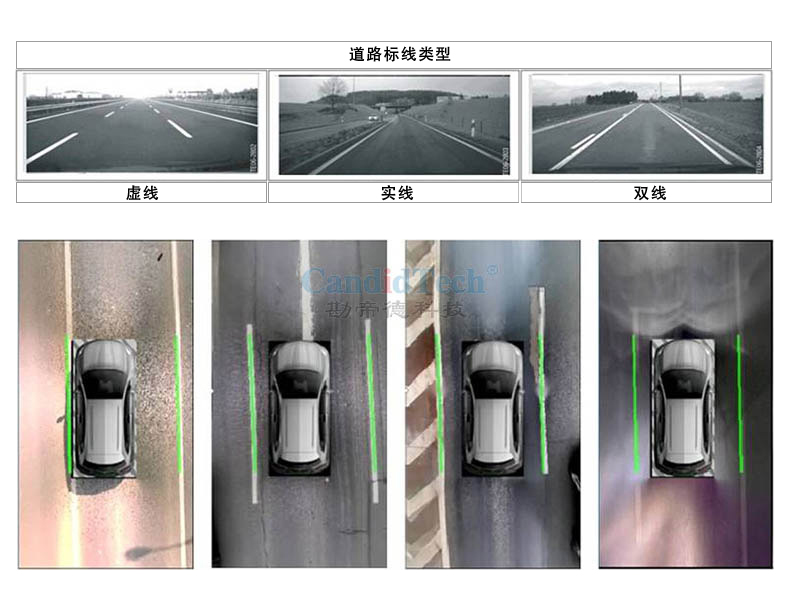
5)车道偏离系统(LDWS)
系统开启后,车速达到50km/h后(可定制),系统会根据4路摄像头拼接而成的2D环视画面,自行识别清晰的标准车道线。
车道偏离预警系统,在驾驶员无意识(驾驶员未打转向灯)偏离原车道时,能在偏离车道0.5秒之前发出警报,以提醒驾驶员目前车辆偏离的状况,为驾驶员提供更多的反应时间,大大减少了因车道偏离引发的碰撞事故。
相关的标签 :







 支持 IPv6 网络
支持 IPv6 网络 



























